
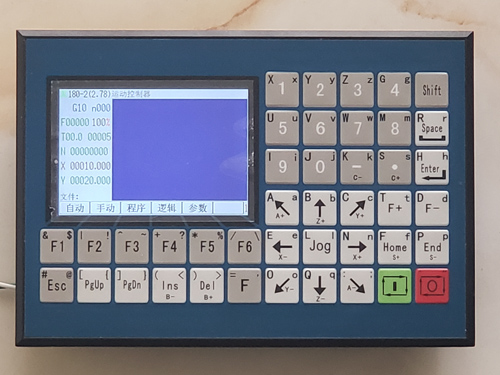
單軸伺服運動控制器如何實現單軸運動的精準控制
添加時間:2023-11-04 05:00:26 文章來源:廊坊市九盈數控技術有限公司
單軸伺服運動控制器通過控制伺服驅動器對伺服電機進行控制,從而實現單軸運動的精準控制。具體實現過程如下:
設定運動模式:根據所需的運動方式(如點位運動、直線插補、圓弧插補等),在控制器上設定相應的運動模式和參數。
信號輸入:通過傳感器或編碼器等設備采集目標位置、速度和加速度等信號,將信號輸入到控制器中。
運動控制:控制器根據輸入的信號和設定的運動模式,計算伺服電機的運動軌跡和控制命令,將控制命令發送給伺服驅動器。
伺服驅動器控制:伺服驅動器接收到控制命令后,通過控制伺服電機的轉速和轉向等參數,實現對電機的控制,驅動電機按照設定的軌跡運動。
反饋控制:伺服驅動器通過編碼器等設備對電機的位置和速度等參數進行實時反饋,控制器根據反饋信息進行調整,保證電機按照預定軌跡精準運動。
停止控制:當電機到達設定的目標位置后,控制器停止向伺服驅動器發送控制信號,電機停止運動。
通過以上步驟,單軸伺服運動控制器可以實現對單軸運動的精準控制。同時,控制器還可以實現對電機的速度、加速度、減速度等參數的控制,從而滿足不同應用場景的需求。
上一條:小模數齒輪滾刀CAD系統
下一條:基于板卡的兩軸運動控制系統
相關產品





 冀公網安備 13100202000581號
冀公網安備 13100202000581號