
獨立式運動控制器在機器人運動控制中的應用與發展趨勢
添加時間:2023-06-24 07:00:49 文章來源:廊坊市九盈數控技術有限公司
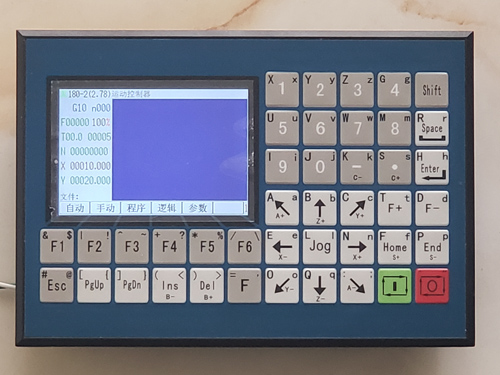
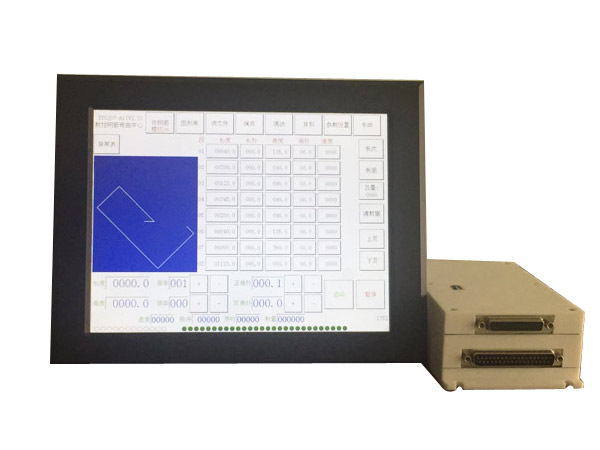
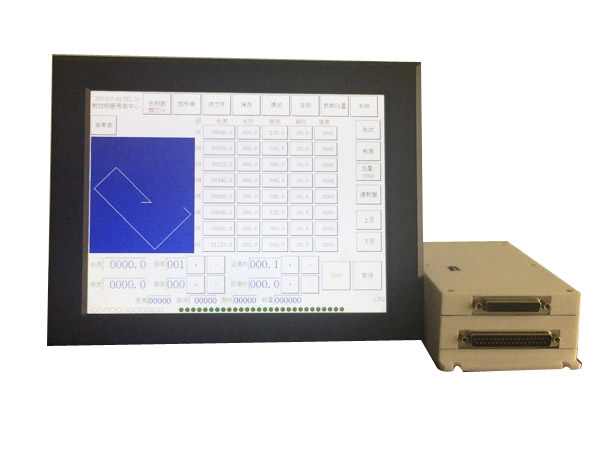
獨立式運動控制器在機器人運動控制中的應用越來越廣泛,其主要原理是通過內置的高性能控制芯片,實現對機器人的運動控制和位置控制。獨立式運動控制器具有以下幾個應用:
工業機器人控制:獨立式運動控制器可以用于工業機器人的控制,實現對機器人的運動控制和位置控制,提高機器人的運動精度和效率。
服務機器人控制:獨立式運動控制器可以用于服務機器人的控制,實現對服務機器人的運動控制和位置控制,提高服務機器人的運動精度和效率。
農業機器人控制:獨立式運動控制器可以用于農業機器人的控制,實現對農業機器人的運動控制和位置控制,提高農業機器人的運動精度和效率。
醫療機器人控制:獨立式運動控制器可以用于醫療機器人的控制,實現對醫療機器人的運動控制和位置控制,提高醫療機器人的運動精度和效率。
獨立式運動控制器在機器人運動控制領域的發展趨勢主要有以下幾個方面:
高性能:獨立式運動控制器需要具備高性能的處理器和存儲器,以滿足機器人運動控制的高速運算和大容量存儲需求。
多軸協同運動控制:獨立式運動控制器可以實現多軸協同運動控制,對于復雜的機器人運動,可以實現多軸協同控制,提高控制精度和穩定性。
智能化運動控制:獨立式運動控制器可以引入先進的控制算法和傳感器技術,實現機器人的自適應、智能化和自學習等功能,提高機器人的運動控制能力。
網絡化控制:獨立式運動控制器可以實現網絡化控制,通過互聯網和物聯網技術,實現對機器人的遠程監控和遠程控制,提高機器人的靈活性和便捷性。
安全控制:獨立式運動控制器需要具備安全控制功能,保證機器人的運動安全和控制安全,防止機器人的運動控制對人員和設備造成傷害。
綜上所述,獨立式運動控制器在機器人運動控制中具有重要的應用和發展前景,可以提高機器人的運動精度和效率,促進機器人技術的發展。
相關產品






 冀公網安備 13100202000581號
冀公網安備 13100202000581號